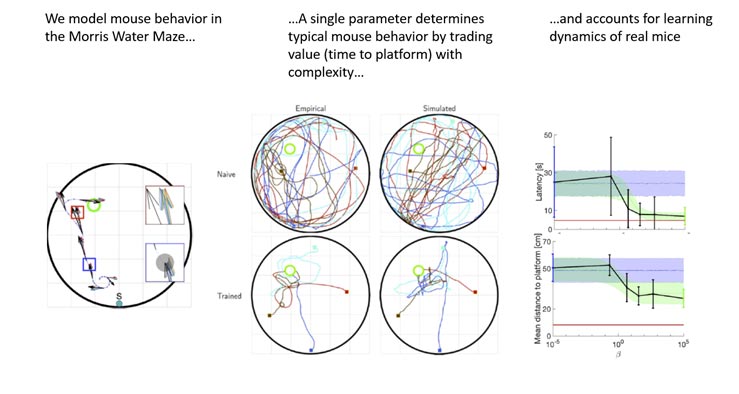
We model mouse behavior in the Morris Water Maze (MWM), in which a mouse has to swim to a submerged platform, using spatial cues for navigation (left panel). Naive mice are governed by noise, producing long, meandering paths (top, middle panel) while trained mice (after 4-5 exposures to the MWM) produce swimming paths that are purposeful and largely directed toward the platform (bottom, middle panel). In the model, at each moment in time, the mouse can apply forces to change its swimming direction, which are then corrupted by noise. The model specifies the optimal forces to be applied (colored arrows in left panel) as a function of a single parameter, beta, the specifies the tradeoff between the extent to which the mouse wants to reach the platform (‘value’) and the amount of information that the mouse can apply to the task (‘complexity’). When beta is low, the information available for the task is low, and the model produces long, meandering swimming paths, like the naive mice (top, middle panel). When beta is high, the information available for the task is high, and the model produces purposeful swimming paths directed towards the platform (bottom, middle panel). Intermediate values of beta produce behavior that fits mouse behavior at intermediate training levels (right panels). The model successfully accounts also for differences in swimming behavior of different mouse strains. This is the first successful application of information-limited dynamical models to animal behavior.